I. Conspectus Systematis
1. Contextus Proiecti
Recentibus annis, vectura illicita vehiculorum mercium in viis publicis gravissima quaestio facta est, quae salutem commeatus publici periclitatur. Vias publicas et pontes onerandos reddit, ita ut vita utilis viarum et pontium magnopere imminuatur; simul, factor salutis vehiculorum magnopere minuitur, ita ut casus commeatus perpetuo efficiatur; etiam facile est congestionem commeatus et pollutionem ambitus effici.
Omnibus gradibus gubernationes per totam nationem continuo conatus suos ad vecturam vehiculorum oneratorum in viis publicis coercendam auxerunt et magnos eventus gradatim assecuti sunt. Attamen, ob complexas causas sociales et oeconomicas, status nationalis deprehensionis onerationis adhuc gravis est, et pericula occulta recidivationis nondum eliminata sunt; consolidatio eventuum gubernationis et continua promotio operis deprehensionis onerationis adhuc magno pressu subiacent. Ergo, gubernatio vecturae vehiculorum oneratorum opus longum et cotidianum est, quod perseverandum est. Maximi momenti est gubernationem operis onerati in mechanismum longum includere. Etiam munus legale deterrendi vehicula onerata agit, et etiam functiones suas amplificare potest ut inspectio viarum fiat, mentalitas fortuita operationum vecturae illegalis reprimatur, et varias operationes vecturae illicitae, inter quas vectura onerata, tempestive coerceatur et eliminet.
2. Introductio ad systema ponderationis
Principium ponderationis staterae staticae autocinetorum est omnia vehicula in suggestu ponderationis collocare ut totum vehiculum ponderetur. Magnam ponderis accuratam et claras normas nationales habet. Attamen statera conventionalis autocinetorum tantum pondus totius vehiculi accipere potest, non autem pondus axis. Iudicare potest utrum totum vehiculum oneratum sit necne, sed non iudicare potest utrum pondus axis oneratum sit necne. Non potest requisitis administrationis viarum satisfacere ad finem administrationis vecturae oneratae assequendum.
Hoc consilium peritiam annorum societatis nostrae in designando et fabricando apparatu ad detegendum onus nimium et eorum usum actualem in variis regionibus patriae coniungit, usum variorum apparatuum ad detegendum onus nimium in foro diligenter investigat, et necessitates specificas administrationum viarum publicarum pro administratione vecturae nimiae plene considerat. Technologiam provectam et notiones designandi singulares adhibet ad systema dynamicum et praecisionis detectionis ponderis vehiculi et generis axis evolvendum. Pondus et axis et pondus totale ponderare potest, et genus axis distinguere. Accuratio ponderis axis etiam magnopere augeri potest.
2. Compositio systematis oneris excessivi et limitis excessivi
1. Proprietates systematis
Vehicula lenta celeritate transeuntia ponderare et automatice determinare potest utrum pondus vehiculi an pondus axis nimium oneratum sit;
Numerum axium, gregem axium, pondus axium et pondus vehiculi detegere potest;
Informationem completam de ponderatione vehiculi formare potest, inter quas genus axis, pondus axis, coetus axis et pondus totale;
Informationem ponderationis per interfaciem datorum ad computatrum transmittere potest;
Pars centralis systematis apparatum maturum et fidum adhibet, qui omnes designum modularem accipiunt, facile sustentantur et amplificantur, summam systematis firmitatem praestantes.
Programmatura systematis maturam, summe certam est, notitia completa et efficax, et plene communicari potest, quo efficacitas operis efficaciter augetur et varias lacunas administrationis quam maxime tollitur.
2. Processus systematis
Autocinetum onerarium in lineam ponderationis stationis onerationis excessivae introducitur, et systema recognitionis laminae vehicularis numerum laminae vehicularis identificat;
Identificator pneumatici (axis) numerum axium distinguit, et systema ponderationis vehiculi ponderare, gregem axium determinare, et pondus axium computare incipit.
Cum omnia vehicula per separatorium vehiculorum transeunt et suggestum ponderationis ingrediuntur, et libra in statu relative aequilibrato est, pondus totale vehiculi notatur et pondus axis obtinetur.
Systema ponderationis informationes ponderationis (numerum laminae vehiculi, numerum axium, pondus axium, pondus totale vehiculi, etc.) ad computatrum detectionis mittit. Computatrum determinat utrum limitem excessivum sit necne et informationes detectionis, ut pondus vehiculi, limitem excessivum, et rationem limites excessivi, in velo monstrat.
Postquam vehiculum operationes pertinentes perfecerit, ductores vehiculi vehicula non nimis limitata dimittent ut aream detectionis exeant secundum informationem in velo monstrato, vehicula nimis limitata dirigant ut aream stationis ad processandum ingrediantur, formulam inspectionis vehiculi nimis limitati imprimunt, et operationes onerationis pertinentes perficiunt;
3. Compositio systematis et consilium dispositionis
3.1 Compositio systematis
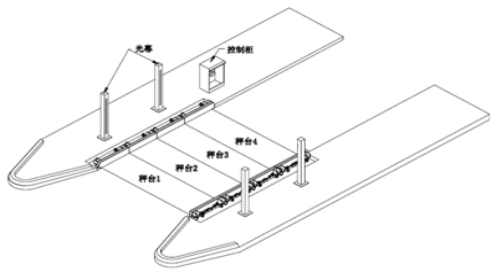
Systema limitis excessivi et onerationis excessivae constat ex libra ponderationis axium dynamica quattuor mensarum ZDG, instrumento moderatorio, separatore vehiculi infrarubro, identificatore axis rotae cum suggestu ponderationis, armario moderatorio (instrumentis ad libitum optionalis: systema recognitionis laminarum vehicularium, systema ostentationis magni LED, systema monitionis vocalis, systema gubernationis vehiculi, computatro industriali, impressore tesserarum, fonte potentiae continue UPS, programmate systematis detectionis limitis excessivi et onerationis excessivae, systemate monitorio) et aliis accessionibus et funibus.
3.2 Schema dispositionis systematis ut monstratur:
Ordo operis:
1) Vehicula ordine viam ingrediuntur, distantia tuta servantes, separatorem vehiculorum infrarubrum activantes;
2) Uterque axis vehiculi per suggestum ponderatorium multisuperficiale transit;
3) Moderator ostentationis signum ponderationis a sensore suggestus ponderationis et signum sensoris rotae acceptum tractat, axem secundum condiciones logicas separat, et casus speciales efficaciter tractat;
4) Pars posterior vehiculi e suggestu ponderatorio multisuperficiali et separatore vehiculi infrarubro exit;
5) Moderator ostentationis signum finis vehiculi plene iudicat, fretus signo occlusionis a separadore vehiculi infrarubro detecto et signo ponderationis a sensore ponderationis capto;
6) Moderator ostentationis signum ponderationis, quod vehiculum supra dictum per suggestum ponderationis transit, receptum tractat;
7) Moderator ostentationis informationem ponderationis completam totius vehiculi format, et informatio ponderationis completa celeritatem vehiculi, genus axis, pondus axis, pondus coetus axium, pondus totale, etc. comprehendit;
8) Processum ponderationis unius vehiculi perficite et ponderationem proximi vehiculi exspectate.
9) Per totum processum operis, systema varias condiciones speciales automatice tractat, ut ingressum plenum et exitum plenum, ingressum et exitum repetitum, et moram longam in suggestu ponderationis;
Systema sequentem vehiculi condicionem automatice et efficaciter tractare potest, et sequens ponderatio vehiculi nullum effectum in accuratam notitiarum habet.

Tempus publicationis: XX Februarii, MMXXXV